


電 話:400-00000000
傳 真:400-00000000
郵 箱:xxxx@xxx.com
地 址:xxxxxxxxxxxxxx
網 址:www.mustikarentalmobil.com
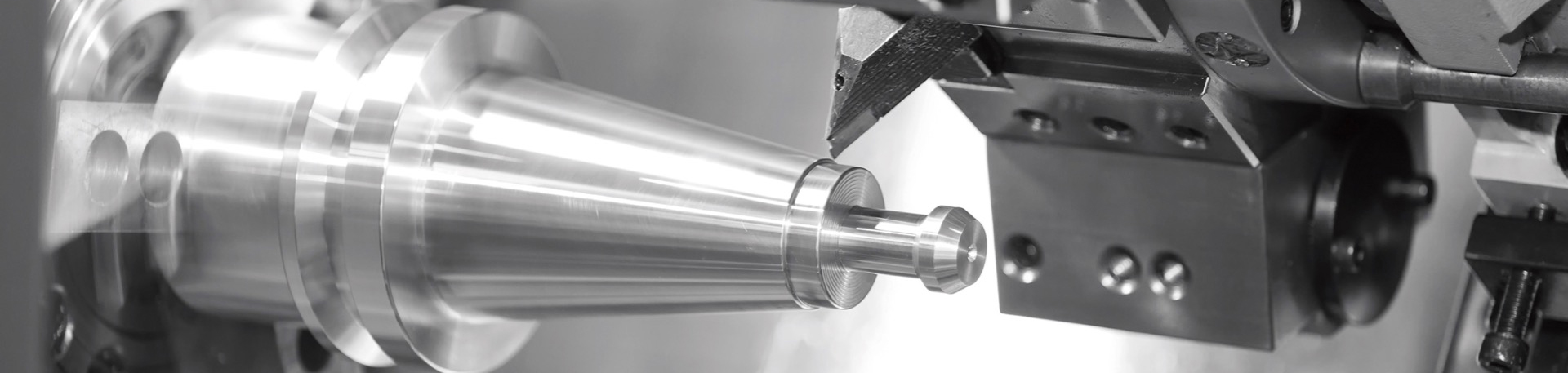
全自動數控車床的震蕩常見故障一般出現在設備部位和走刀伺服系統。
造成震蕩的因素有很多,除開機械設備領域具有不能消 除的傳動系統空隙、彈性變形、摩阻等眾多要素外,伺服系統的相關主要參數的危害也是至關重要的一方面。伺服系統有交 流和直流電之分。
絕大多數數控機床選用的是全閉環控制方法,造成伺服系統振動的因素大概有四種狀況: 1、部位環欠佳又造成輸出短路; 2、速率環欠佳造成的振動; 3、伺服系統可調式定位儀很大造成工作電壓輸出失幀; 4、傳動系統機械設備裝如滾珠絲杠空隙很大。這種操縱環的輸入輸出主要參數失幀或機械設備傳動系統空隙太大多數是造成振動的首要要素。它 們能夠根據伺服電機自動控制系統開展技術參數提升。

精密數控車床震蕩的基本上對策: 1、閉環控制伺服系統導致的震蕩 有一些數控機床伺服系統選用的是半閉環控制設備,而全閉環控制伺服系統務必是在其部分半閉環控制系統軟件不產生振動的條件下開展參 數調節,因此二者如出一轍。 2、減少部位環增益值 在伺服系統中有參照的指標值,快速數控車床發生震蕩可適度減少增益值,但不可以降過多,由于要確保的穩定誤 差。 3、減少負荷慣性力比 負荷慣性力比一般設定在產生振動時所顯示主要參數的70%上下,如不可以清除常見故障,不適合再次減少該變量值。 4、添加占比高等數學器(PID) 占比高等數學器是一個多用途控制板,它不但能高效地對電流強度數據信號開展占比增益值,與此同時可調整輸出數據信號落后成超 前的難題,震蕩常見故障有時候因輸出電流強度產生落后成超前的狀況而造成,這時候可根據PID來控制輸出電流強度相位差。
自動數控車床的震蕩常見故障一般出現在設備部位和走刀伺服系統。造成震蕩的因素有很多,陳了機械設備領域具有不能清除 的傳動系統空隙、彈性變形、摩阻等眾多要素外,伺服系統的相關主要參數的危害也是重要的一方面。伺服系統有溝通交流和 直流電之分。絕大多數數控機床選用的是全閉環控制方法,造成伺服系統振動的因素大概有四種狀況: 部位環欠佳又造成輸出短路; 速率環欠佳造成的振動; 伺服系統可調式定位儀很大造成工作電壓輸出失幀; 傳動系統機械設備裝如滾珠絲杠空隙很大。這種操縱環的輸入輸出主要參數失幀或機械設備傳動系統空隙太大多數是造成振動的首要要素。他們 都能夠根據伺服電機自動控制系統開展技術參數提升。


 電話
電話
 手機
手機
 地址
地址
 傳真
傳真